要約:ロボットレーザー加工はますます普及しており、ロボット加工技術(shù)の迅速なプログラミングとシミュレーションにより、加工の正確性を容易に検証できます。家庭用ロボットオフラインプログラミングソフトウェアの代表であるiRobotCAMは、iRobotCAMの使いやすいプログラミングプロセスを活用することで、加工プログラミングとシミュレーション検証を?qū)g現(xiàn)し、レーザー加工の利便性をさらに高めています。
あらゆる加工技術(shù)の誕生は、産業(yè)用途における特定の問題を解決するためにあります。レーザーの応用はますます広まっています。主な理由は、レーザーのエネルギーを制御できることで、より複雑な加工技術(shù)を?qū)g現(xiàn)できるため、2軸から5軸までのシンプルなレーザー切斷から、航空機(jī)部品などのより複雑な部品加工まで、様々な用途に利用できるからです。レーザー溶接の分野では、様々な部品の加工ニーズに応えています。ロボットによるレーザー加工をより有効に活用するためには、レーザー自體のハードウェア機(jī)能に加えて、加工軌跡生成とシミュレーションの利便性と精度に対するさらなる要件が求められています。
ロボットによるレーザー加工の場合、レーザー切斷技術(shù)の難しさを例に挙げると、主に次のようなものがある。
- 位置決め?補(bǔ)正効率が低く、適応性が低い:ラインレーザー位置決めや抵抗器位置決め方式にはそれぞれ限界があります。ラインレーザーの交差部は干渉の影響を受けやすく、抵抗器位置決めではワークの配置に制約があります。位置決め?補(bǔ)正:ワークの配置に少しでもずれがあると、位置決めに失敗しやすくなります。大型または複雑なワークの場合、すべてのエッジを1つずつスキャンする必要があり、効率が低下します。また、これらの方式は通常、局所的な位置補(bǔ)正しか提供せず、円弧狀の特殊形狀部品への適応性が低いという欠點(diǎn)があります。
- ロボットの軌道計(jì)畫: ロボットの軌道プログラミングは柔軟ですが、複雑または繊細(xì)な切斷タスクでは、ロボットの動(dòng)作軌道を最適化して切斷の効率と品質(zhì)を向上させる方法が依然として課題となっています。
- 機(jī)器のメンテナンスとキャリブレーション:レーザー切斷ロボットは、レーザーエミッター、センサー、ロボットアームなど、複數(shù)の精密部品で構(gòu)成されています。これらの部品のメンテナンスとキャリブレーションは、切斷精度を維持し、機(jī)器の壽命を延ばすために不可欠です。しかし、定期的なメンテナンスとキャリブレーションの実施方法、そして機(jī)器の故障への迅速な対応方法は、ロボットによるレーザー切斷プロセスにおいて常に直面する課題です。
ロボットのオフラインプログラミングおよびシミュレーションソフトウェアである iRobotCAM は、ロボットレーザー加工のプロセス要件をターゲットにしており、過去 10 年間の溶接分野における研究開発の蓄積に基づいています。
- 3次元CADプラットフォームの拡張性を活かし、レーザー溶接軌跡抽出の自動(dòng)化を?qū)g現(xiàn)し、レーザー軌跡のさらなる精密制御を?qū)g現(xiàn)します。
- ロボット物理エンジンの研究開発における長年の経験を活かし、ロボットレーザープロセスのシミュレーションを迅速に実現(xiàn)し、加工プロセスのデジタルツインを?qū)g現(xiàn)します。
- iRobotCAM の軌道生成モジュールと軌道最適化モジュールを使用すると、ロボットの軌道を自動(dòng)的に調(diào)整して、衝突、特異點(diǎn)、到達(dá)不能點(diǎn)を回避できます。
- iRobotCAM の生産ライン設(shè)計(jì)とロボットプログラミングおよびシミュレーションを組み合わせることで、iRobotCAM は生産ラインレベルの設(shè)計(jì)とシミュレーションを?qū)g現(xiàn)し、設(shè)計(jì)とシミュレーションの統(tǒng)合を?qū)g現(xiàn)します。
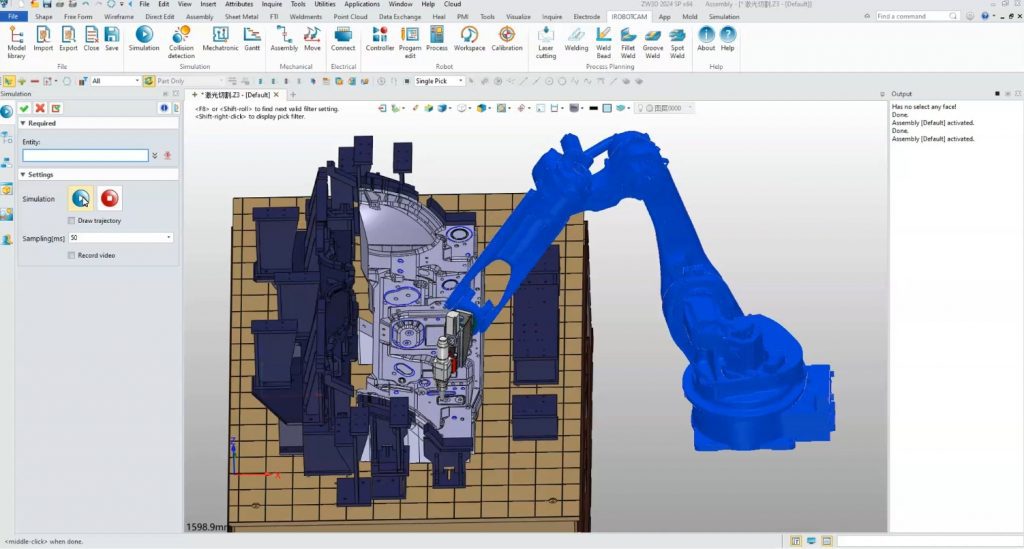
iRobotCAM でロボットレーザー加工のプログラミングとシミュレーションを簡単に実裝する方法を見てみましょう。
Yueqing Technologyについて:
Yueqing Technology は、生産ラインの電気機(jī)械概念設(shè)計(jì)、ロボット処理プログラミングシミュレーション、仮想デバッグを統(tǒng)合したデジタルソリューションであるオープンな iRobotCAM ロボット オフライン プログラミング プラットフォームの構(gòu)築に取り組んでいます。