具身智能的快速發展,使得設計上百花齊放,有兩足的機器人,有兩足的機器鴨,也有四足的機器狗,甚至四足的獨角獸,形態不一,背后的核心邏輯在于智能體的設計。而如何快速的將以結構設計為主的模型轉化為以具身智能機器人設計為標準的模型,這正是越擎科技致力于打造iRobotCAM的的根源,iRobotCAM就是一款可以快速的滿足結構設計到具身智能設計的工具軟件,也可能是市面上最簡單的具身智能機器人設計與仿真軟件。
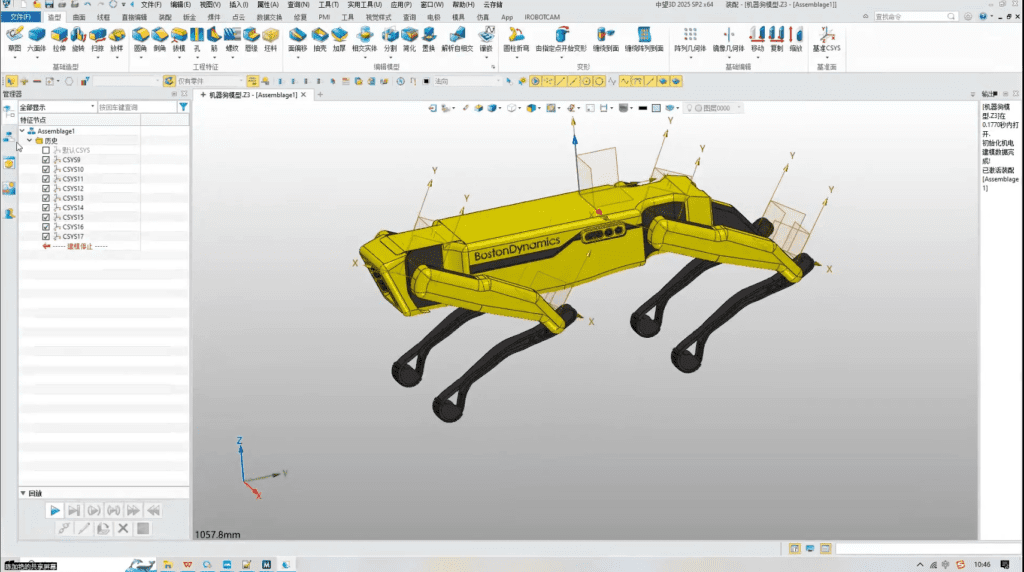
目前開源社區上,有包括靈犀機器人等人形機器人為代表的模型,也有波士頓為代表的四足機器人等,我們以開源社區的波士頓的四足機器狗為例,一步步的簡要闡述如何實現機器人的設計與仿真。
1.iRobotCAM基于三維幾何內核的技術架構,可以導入來自于各個三維軟件的包括Catia, Solidworks, NX, Creo, Inventor等數據格式,而利用多文件導入Solidworks或Step的機器狗文件,可以在iRobotCAM建立四足機器人的三維結構圖。
2.利用便捷的裝配管理功能,可以快速的設置每個零件的材料屬性,計算慣量等物理特性

3.iRobotCAM作為一個專業的機器人設計與仿真軟件,利用機電設計功能,可以建立機電對象及運動副,包括碰撞體檢測等

4.利用便捷的骨架式的機器人關節設計面板,可以將機器人的所有關節機構的關聯起來,形成完慗的具身智能通用機器人。

5.利用iRobotCAM便捷的URDF導入與導出功能,通過生成通用的 URDF 文件,無縫對接MuJoCo、Simbody、OpenSim , Issac sim等主流生物力學引擎仿真需求。

利用iRobotCAM機器人設計工具,機器人設計與仿真不再繁瑣, 與此同時,根據具身智能機器人設計需求或仿真數據的反饋,機器人的結構設計也可以隨時更新,通過設計與仿真的不斷驗證,最終形成滿足需求的機器人。
關于南京越擎信息科技有限公司
南京越擎科技致力于打造開放的iRobotCAM具身智能機器人設計,編程與仿真平臺,是集產線機電概念設計,離線編程與虛擬調試,機器人建模與訓練等一體的數字化解決方案。
iRobotCAM網站: www.iRobotCAM.cn,聯絡郵件: cooperation@iRobotCAM.com