
波士頓四足機器狗的設計與仿真,具身智能設計軟件iRobotCAM輕松完成
目前開源社區上,有包括靈犀機器人等人形機器人為代表的模型,也有波士頓為代表的四足機器人等,我們以開源社區的波士頓的四足機器狗為例,一步步的簡要闡述如何實現機器人的設計與仿真。
目前開源社區上,有包括靈犀機器人等人形機器人為代表的模型,也有波士頓為代表的四足機器人等,我們以開源社區的波士頓的四足機器狗為例,一步步的簡要闡述如何實現機器人的設計與仿真。

人形機器人的設計與仿真是全民關注的話題,主要在于其人的形狀,與人類的同理心產生共鳴,而對于人形機器人的研究與學習也吸引著越來越多的機器人興趣者的參與,而如何快速的設計一款人形機器人是一個行業卡點,iRobotCAM機器人與仿真軟件應運而生,機器人設計與仿真輕松上手。

具身智能的行業發展極其迅猛 ,而各種形態的具身智能研究極為火爆,如何快速的驗證具身智能設計的合理性是一個行業共性問題,而iRobotCAM正是為解決這個問題而開發,快速上手,輕松完成。
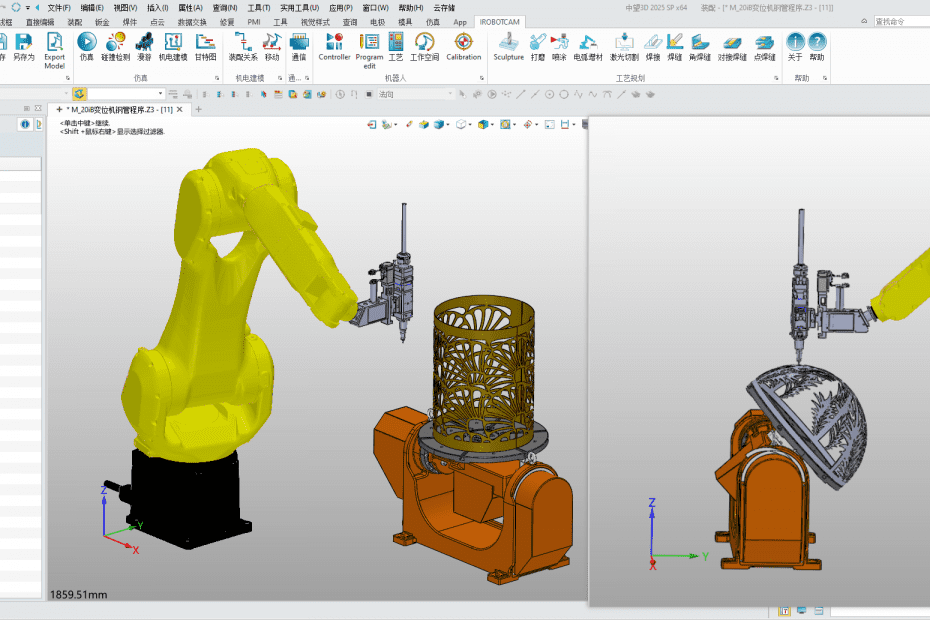
摘要:激光具備高精度的特性,而激光設備如何實現高精度的應用,不僅涉及設備的硬件精… 閱讀更多 »用戶案例:為什么選擇iRobotCAM機器人離線編程軟件作為機器人激光加工首選方案

概要:機器人激光的工藝主要在于高精度,而利用激光實現高精度的制造能力是航天,汽車… 閱讀更多 »應用案例:機器人激光切割有何難點,利用iRobotCAM如何高效地實現機器人5軸激光加工

摘要:越擎科技開發的國產機器人離線編程軟件iRobotCAM能夠將產線設計、離線… 閱讀更多 »機器人離線編程軟件iRobotCAM如何提升產線設計的應用效率

為什么要應用虛擬調試方案,從業者都有很明顯的體會: “作為機器人設備調試從業者而… 閱讀更多 »機器人離線編程軟件iRobotCAM如何滿足機器人虛擬調試應用