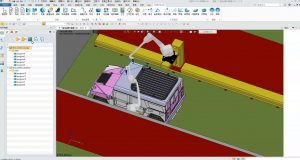
Projeto de rob?s/projeto de linha de produ??o/programa??o offline/comissionamento virtual
Motor de simula??o de física fiável
Comissionamento virtual com múltiplas esta??es de trabalho
Arquitetura de integra??o de processos abertos
Integre rapidamente módulos de processo personalizados
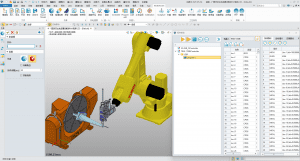
Projeto e Simula??o de Rob?s
Suporta a importa??o de dezenas de formatos de dados, incluindo Solidworks, NX, Catia, Creo, Inventor, STEP, Parasolid, etc.;
Suporta a defini??o de juntas de rob?s, controlo de sinais, etc.
Suporta a importa??o ou exporta??o de URDF, suporta a exporta??o de parametros de junta, inércia e outros, e facilita a utiliza??o de sistemas robotizados, como sistemas ROS ou software de treino de simula??o;
O iRobotCAM possui um mecanismo dinamico completo para garantir que o URDF de saída cumpre os requisitos de simula??o de software como o ROS.
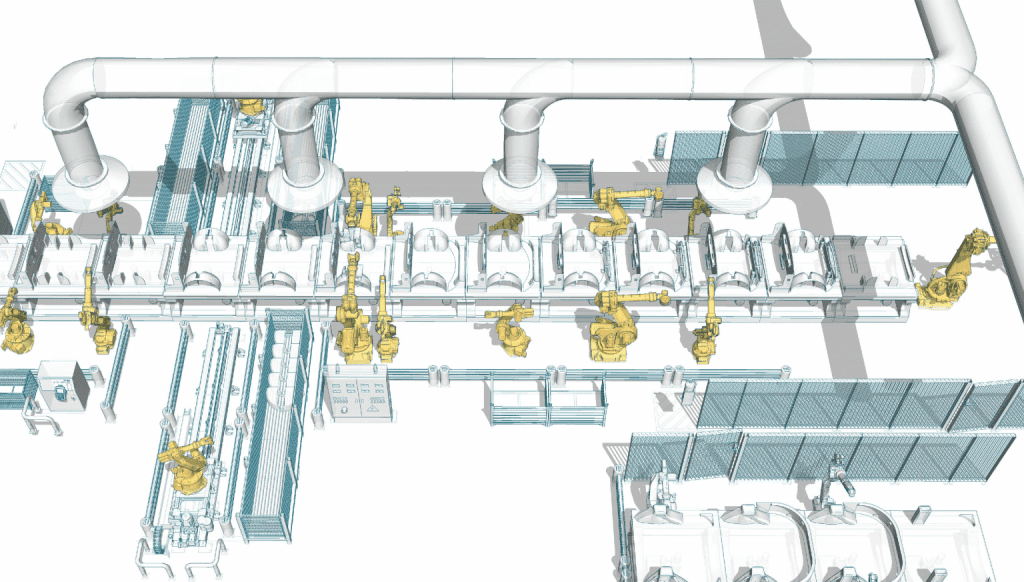
Projeto de linha de produ??o de rob?s
Utilize software de design paramétrico para satisfazer o design de esta??es de trabalho de rob?s individuais e linhas de produ??o de rob?s.
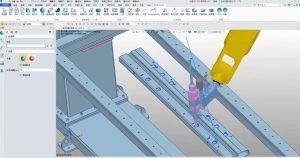
Programa??o offline de rob?s
Processo de programa??o de escritório: importa??o de modelo de rob?–>Planeamento de processos–>Simula??o de processo de maquina??o–>Otimiza??o do sistema de esta??o de trabalho–>Saída de código postal
Verifica??o de programa??o: Suporte à descompila??o de programas de rob?s, que pode verificar e otimizar programas de rob?s
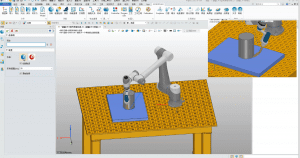
Comissionamento virtual de rob?s
Equipado com depura??o virtual e monitoriza??o virtual, as a??es da esta??o de trabalho do sistema de rob? virtual e da esta??o de trabalho do sistema de rob? real podem ser sincronizadas;
Suporta a simula??o de comunica??o de E/S entre múltiplas máquinas, sincroniza??o entre múltiplos rob?s e planeamento de liga??o entre múltiplos eixos de rob?s.